
檢出率 / 辨識率
導入前
人工或規則式方案不穩
導入後
視 POC 條件穩定提升
依產線現場樣本實測為準
【零件組裝定位對位 | CCD 機器視覺系統】
COGNEX IN SIGHT 3800 應用於pcb-electronics產線視覺檢測,協助達成品質追溯、降低召回風險、提升檢出率與產能釋放。
檢出率 / 辨識率
導入前
人工或規則式方案不穩
導入後
視 POC 條件穩定提升
依產線現場樣本實測為準
追溯完整性
導入前
部分批次紙本
導入後
100% 電子歸檔
符合 GMP / IATF / FDA 等規範
人力釋放
導入前
專人駐點目檢 / 抄寫
導入後
自動化檢測 + 異常通報
依產線節拍與班別配置試算
影片來源:VSK 威視康 YouTube 頻道(同類應用參考,非本案實機影像)
CHALLENGE · 產線挑戰
機電設備產線零件組裝對位的核心挑戰是工件在輸送中可能任意旋轉、明暗度變化、金屬彈簧高反光及塑膠件邊緣破損,傳統像素灰階比對在這類條件下穩定度不足,造成下游組裝對位偏移或機械干涉。
SOLUTION · 應用方案
本案採 Cognex In-Sight 3800 / 7000 智慧相機 + PatMax 形狀對位演算法雙鏡頭架構:一台鏡頭定位母件(塑膠件)位置、另一台抓取子件(彈簧)特徵,sub-pixel 量測 X / Y / θ 後透過 EtherNet/IP 或 PROFINET 將座標差送回機構控制器完成回饋補償。
RESULT · 導入成果
機電組裝視覺定位的實機導入可參考 AI 自動化組裝與套件檢查案例,以及 Pentagon 自動化組裝檢查案例,說明視覺如何整合進高混線多 SKU 的組裝產線。實際定位精度由 VSK 工程師依現場樣品評估。
組裝對位精度的根基是定位演算法。Cognex PatMax 採用幾何輪廓比對而非像素灰階比對,可在以下條件下穩定抓取工件特徵:
另搭配 Edge Detection 邊緣偵測、Sub-Pixel 次像素精度,可將定位精度從像素級提升到次像素級。
Q1:雙鏡頭一定要兩台相機嗎?A:不一定。若工件夠小、兩個特徵可一次入鏡,可改用單一高解析度相機加 ROI 切割;若視野不夠或需要雙角度成像,才需要兩台。
Q2:相機與機構之間怎麼校正?A:採 手眼校正(Hand-Eye Calibration),將相機座標映射到機構座標,是組裝對位的根基。
Q3:彈簧表面反光嚴重抓不到怎麼辦?A:搭配適當光源(同軸光、圓頂光或 偏光片)改善影像對比,由 VSK 工程師依樣品試打光建議。
【零件組裝定位對位 | CCD 機器視覺系統】
案例影片:透過CCD定位相機,準確抓取零件組裝位置,進行工件定位、零件組裝對位。
零件組裝對位,如何透過機器視覺系統來完成工件定位?
先運用雙鏡頭:
1. 抓取塑膠件的位置(綠色框線代表穩定抓取)
2. 抓取彈簧上的特徵(隨意移動仍不受影響)
最後,透過回饋機構補償值,進行精確的組裝對位!
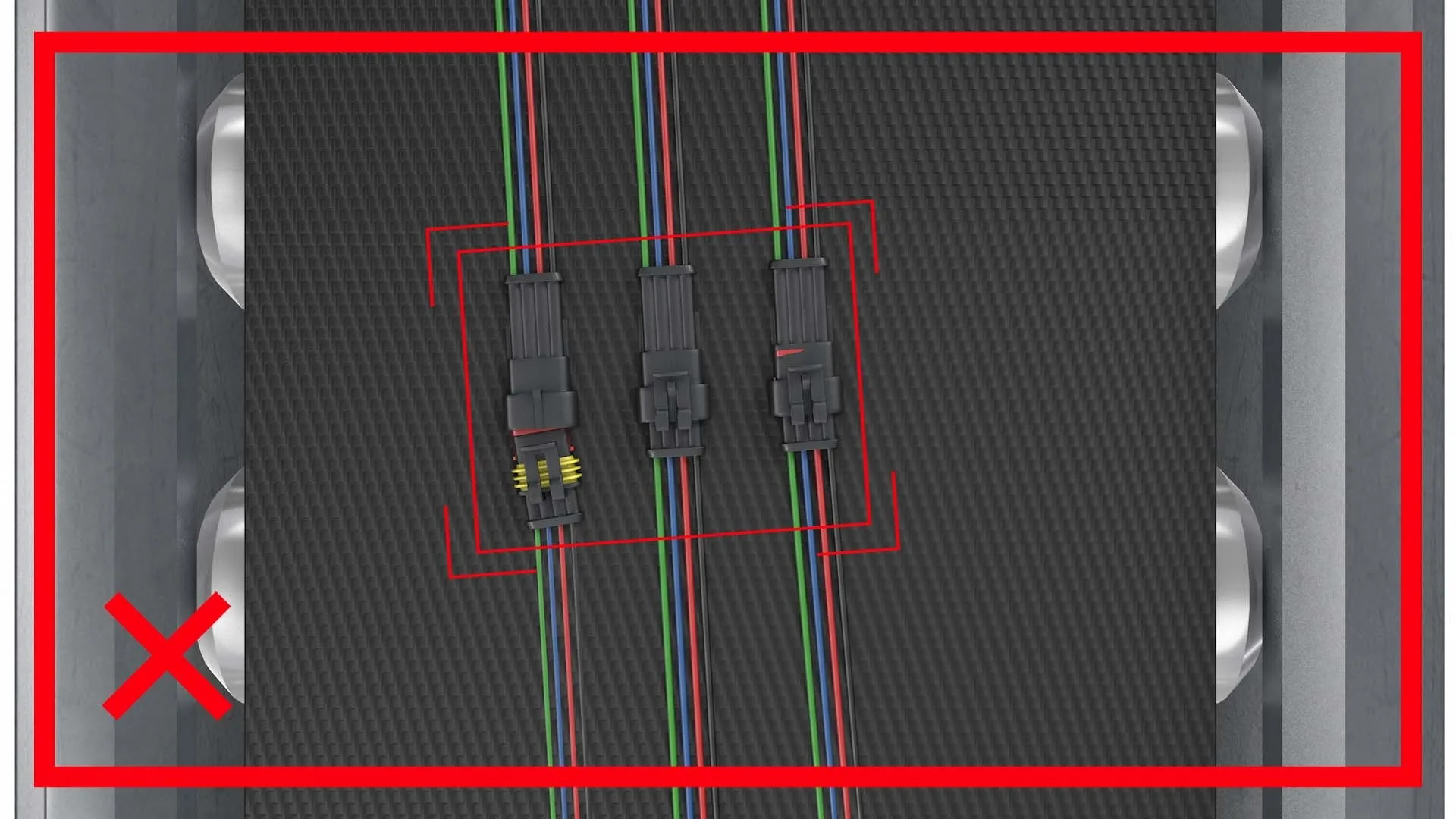
這樣就大功告成。
雙鏡頭組裝對位屬於「視覺定位 + 回饋補償」典型架構:一台鏡頭定位母件、另一台抓取子件特徵,再把座標差送回機構補正。對應的 Cognex 智慧相機選型如下:
PatMax 是 Cognex 於 1997 年推出的形狀對位演算法,目前已演進至 PatMax Redline(〔依官方型錄為準〕速度提升)。核心特性:
| 演算法 | 原理 | 適合 |
|---|---|---|
| PatMax | 幾何邊緣 | 穩定外形、明暗變化大 |
| Pattern Matching(NCC) | 像素灰階比對 | 背景單純、低變異 |
| Blob Analysis | 連通區域分析 | 背光、強對比形狀 |
| ViDi Locate | 深度學習定位 | 紋理變異大、規則難描述 |
PatMax 內建於 In-Sight 2800 / 3800 / L38 / D900 等智慧相機與 VisionPro PC-based 平台。
本案應用於pcb-electronics產線視覺檢測場景;產線特性與品質壓力依客戶實況而異。基於專案保密原則,本頁以 A 廠 / B 廠等代號標示,KPI 數字為類似專案的典型成效範圍。法規 / 規範要求視產業類別而定(例:ISO 9001、客戶端品質規範)。
本案以 COGNEX IN SIGHT 3800 為視覺主機,依產線實況設計光學與整合方案:
機器視覺方案在產線實況下常見的失敗模式可歸為四類。第一,光源 / 工件反光配置不當 — 不同材質(金屬 / 塑膠 / 玻璃 / 透明膜)反光特性截然不同,環形光 / 同軸光 / Dome 光 / 偏振於不同工件表現差異很大,需於 POC 階段以實際樣品測試確認最佳配置。第二,邊界樣品判定不穩 — 訓練樣本若僅含明顯 OK / NG,未涵蓋極輕微缺陷(極小刮痕 / 微弱字元變異),AI 模型容差設定難以對齊產線實況。第三,產線高速振動與位置變異 — 高速輸送帶振動可能使工件於相機前位置漂移 + 旋轉,視覺工具 ROI 浮動定位(PatMax / Edge Learning)+ 機構治具夾持需協同設計。第四,環境漸進變化 — 鏡頭髒污、光源老化、原料 / 模具切換、季節溫濕度差異會讓辨識率漸進下降,需建立定期維護與重訓練機制。
降低失誤的工程實務:POC 階段須收齊邊界樣品作為容差設定基準;光源 over-design 比 POC 需求高 30-50% 強度與均勻度,預留產線環境變異緩衝;定期維護每月清潔鏡頭與光源、每月抽樣對照 AI 判斷、必要時補訓練。產業追溯 / 認證規範由整合方主導,Cognex 視覺設備可提供辨識率穩定度與量化報告。
機器視覺導入的成敗,遠超過「相機規格表上的數字」。VSK 威視康累積在台灣製造業 10 年以上的整合經驗中,反覆觀察到三個關鍵失敗點:第一,沒做 POC 直接下單,產線上線後才發現節拍跟不上、邊界樣品判定不穩、辨識率達不到產線可接受水準。第二,光源沒有 over-design 餘量,產線環境光變化(季節 / 班別 / 鏡頭髒污)後辨識率明顯下降,每月需大量人工微調。第三,視覺與機構 / I/O 分工模糊,整合方對 PROFINET / EtherNet/IP / MES 字串比對規範不熟悉導致延宕。Cognex PSI(Premier Solution Integrator)認證的訓練重點,正是上述三項:以系統化方法做需求評估、依產線實況設計光源餘量、與設備工程師對接 I/O 與通訊細節。
導入後的服務模式:VSK 設備保固 1 年(自出貨日起算),教育訓練依專案客製。
您的視覺檢測需求由威視康技術團隊接手|電話 +886 2-8809-3200|線上聯絡|查看完整 Cognex 產品線
Cognex 官方網站
本文涉及之 機器視覺、AOI、AI 視覺、深度學習視覺、條碼讀取器、OCR 文字辨識、3D 量測相關方案,VSK 威視康為 Cognex 官方 PSI 認證系統整合商,可依現場提供 Cognex 設備選型建議。

汽車
汽車煞車片高反光金屬表面 0.2-0.5 mm 微小針孔 / 氣孔檢測,本案採用 Cognex In-Sight 3800 + 三層演算法(PatMax + Edge Detection + Edge Learning)實現 99.0-99.5% 檢出率、5-10 倍速度,符合 IATF 16949 audit。

汽車
汽車馬達外殼金屬鑄面字元刻印 OCR 辨識,本案採用 Cognex In-Sight 3800 + OCRMax 字元辨識 + auto-tune 自動容差 + ViDi Read 深度學習 fallback,解決鋁 / 鐵鑄件低對比、刻印工具磨損、多型號 SKU 配方管理三大難題,符合 IATF 16949 audit。

食品飲料
食品包裝(麵包 / 飲料瓶罐 / 零食袋)效期 / 批號 / 製造日噴印 OCR 字元自動辨識,本案採用 Cognex In-Sight 3800 + ViDi EL Read 邊緣 AI OCR 對應 800-1,500 件/分高速產線,符合 HACCP + ISO 22000 + 食安法紀錄保存。
想了解 Cognex 台灣代理、Cognex 中文型錄、機器視覺選型 / 採購、工業條碼讀取器、AOI 自動光學檢測?以下 7 篇深度指南由 VSK 威視康整理。
Cognex 台灣代理 →
PSI 認證系統整合商 / 14 年深耕製造業 / 跨 10 大產業近百件實戰案例
Cognex 中文型錄索引 →
DataMan / In-Sight / 3D / VisionPro / ViDi 完整中文型錄與規格
機器視覺完整指南 →
什麼是機器視覺、應用情境、選型流程、ROI 試算
工業條碼讀取器指南 →
DataMan 全系列、HotBars / 2DMax / DPM、ISO 條碼驗證選型
AOI 自動光學檢測 →
從 PCB SMT 到泛產業 AOI、Cognex AI 視覺整合、機型對應
機器視覺採購指南 →
機器視覺價格 / 報價 / 供應商 / 需求評估申請 / 主流品牌比較
機器視覺詞彙百科 →
69+ Cognex 演算法、工業協定、國際標準、技術概念完整中文解釋
業界實戰案例 →
半導體、汽車、醫療、EV 電池、PCB、物流、食品多產業視覺檢測案例
VSK 威視康公司簡介 →
2012 年成立 / Cognex 官方 PSI 整合商 / 服務內容 / 技術團隊