PatMax 的核心價值
PatMax 是 Cognex(康耐視)於 1997 年 12 月由共同創辦人 William Silver 開發的幾何圖樣定位演算法,是工業視覺領域廣泛採用的 Pattern Matching 解法之一。其核心特色在於:用幾何邊緣特徵比對達到 sub-pixel(次像素)精度。
傳統的 Pattern Matching 演算法(NCC / SAD)只能精確到「像素」(pixel)等級,例如:「物件位於 X=153, Y=78」。但實際工業檢測中,物件可能位於 X=153.42, Y=78.86 之間(小數點位置)— PatMax 用幾何分析(不是像素灰階比對)達到這層精度。
PatMax 跟一般 Pattern Matching 的差異
| 比較項目 | 一般 Pattern Matching | Cognex PatMax |
|---|---|---|
| 比對方式 | 像素灰階值比對 | 幾何邊緣特徵比對 |
| 精度 | ±1 pixel | sub-pixel(次像素級,依鏡頭、影像清晰度與訓練樣本品質而定) |
| 旋轉容忍 | 0°(需用多個樣本) | 任意角度 360° |
| 縮放容忍 | 固定大小 | ±50% 縮放 |
| 光照變化 | 敏感 | 抗光照變化 |
| 部分遮擋 | 失敗 | 可容忍部分遮擋(容忍度依樣本而定) |

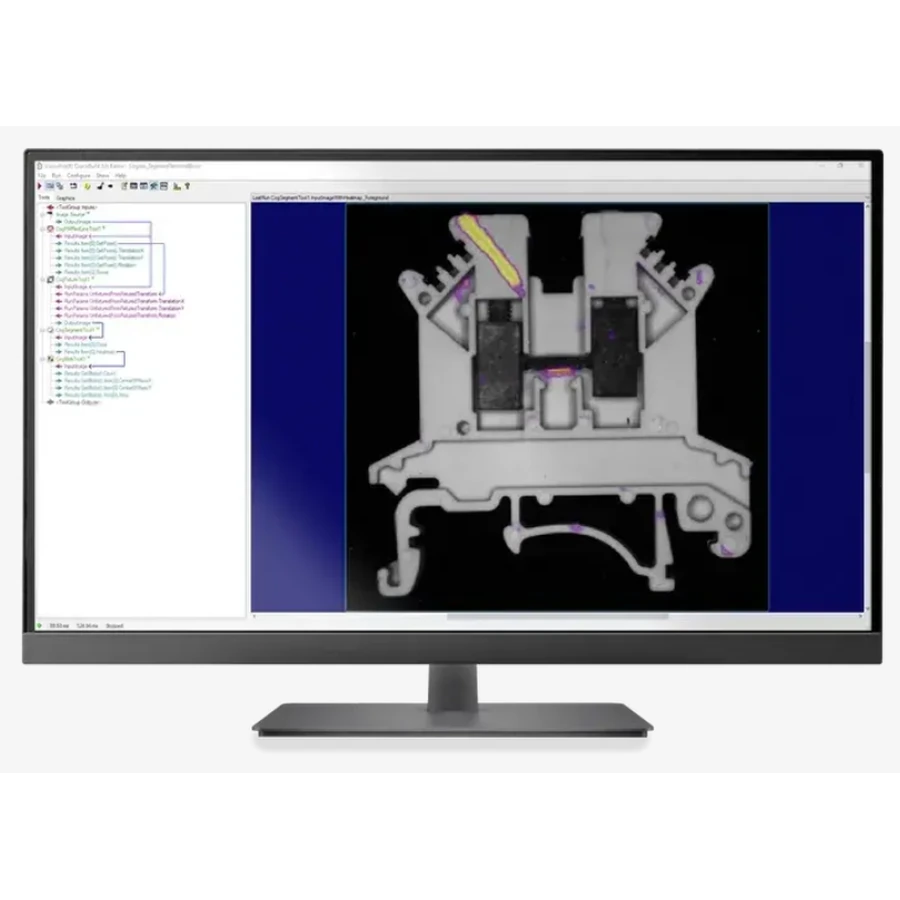
PatMax 的工作原理(簡化解釋)
- 訓練階段:對標準物件提取「幾何邊緣特徵」(不是儲存影像)
- 執行階段:對檢測影像同樣提取邊緣特徵
- 比對:用幾何關係(不是像素灰階)計算最佳匹配位置
- 輸出:精確到 sub-pixel 的座標(X, Y, 旋轉角度, 縮放比例)

主要應用場景
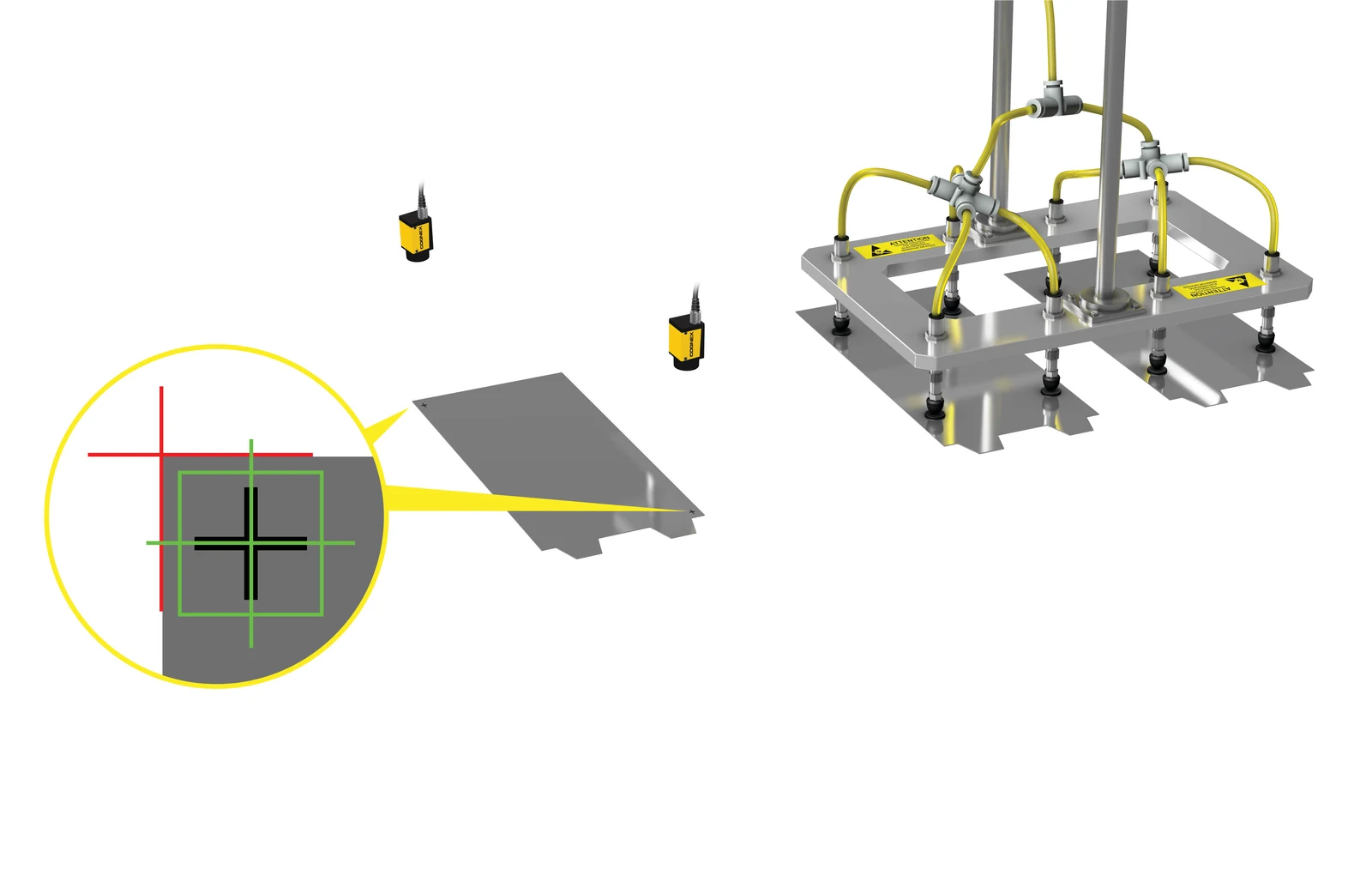
圖片來源:Cognex Corporation
- 機械手臂視覺引導 — 精準告訴機械手臂工件位置(包含旋轉角度)
- 半導體 IC 載板定位 — wafer / IC 載板精密定位給後續加工
- PCB 元件定位 — SMT 上料機 Tray 盤元件精準取放
- 汽車焊接定位 — 車身焊縫位置追蹤
- 任何需要「先找到位置才能檢測」的應用

哪些 Cognex 產品內建 PatMax?
PatMax 已整合到所有 Cognex 工業視覺產品:


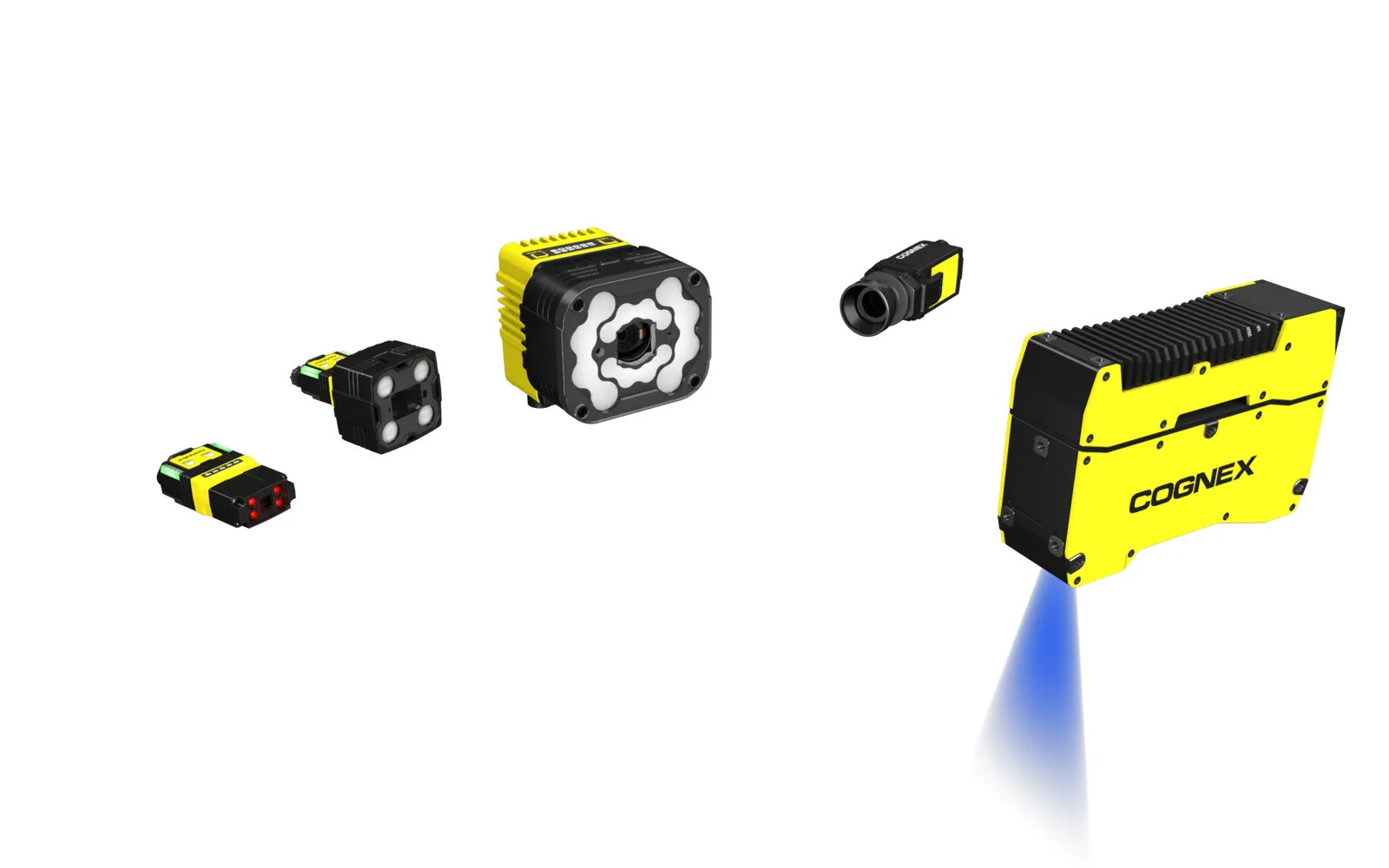
- In-Sight 智慧相機系列(3800、7000、8900 等)— 內建 PatMax 工具
- VisionPro 軟體 — 完整 PatMax SDK
- PatMax RedLine — PatMax 高速版,相同精度、執行更快(In-Sight 3800 / L38 / D900)
工程師常見問題
Q1:PatMax 速度不夠快,有高速版嗎?
A:PatMax 是定位演算法的「精度基準」。若瓶頸是速度(高速產線節拍),Cognex 提供高速版 PatMax RedLine,保留相同精度、執行更快。(AlignPlus 則是 Cognex 針對面板 FPD 對位設計的應用軟體,與一般定位用途不同,勿混淆。)
Q2:PatMax 速度多快?
A:實際速度受影像大小、圖樣複雜度、機型運算能力影響,通常為毫秒級。具體 FPS 請以您的應用實測為準。
Q3:PatMax 需要多少訓練樣本?
A:1 張即可。PatMax 是幾何演算法不是 AI,只需要對「一張標準樣本」訓練幾何特徵。後續執行階段直接比對。
Q4:PatMax 跟 AI 深度學習 ViDi 的 Locate 工具差別?
A:
- PatMax = 規則式幾何定位(適合「形狀明確、變異小」的物件)
- ViDi Locate = AI 深度學習定位(適合「形狀有變異、規則難描述」的物件,如皮革紋路、自然形狀)
兩者互補,可在同一專案內混用。
Q5:PatMax 與一般 Template Matching 的根本差別?
A:傳統 Template Matching 基於灰階像素比對(Normalized Cross-Correlation 等)、受光線變化、旋轉、縮放影響大。PatMax 為 Cognex 商業化的幾何圖樣比對(Geometric Pattern Matching)演算法、從邊緣輪廓提取幾何特徵、相較灰階比對更抗光線變化〔來源:Cognex VisionPro 官方文件、Wikipedia "Template matching"〕。具體實作細節與專利技術屬 Cognex 智慧財產。
Q6:PatMax 與 PatMax RedLine 的差別?
A:PatMax RedLine 是 Cognex PatMax 的高速優化變體、適用超高速產線場景〔來源:Cognex 官方 blog "PatMax RedLine Pattern Matching"〕。兩者具體速度、精度、適用場景差別、依機型與應用而異、可與 VSK 工程師討論實際應用需求。詳細介紹見 PatMax RedLine 完整介紹。
Q7:PatMax 與 ViDi Deep Learning 是競爭還是互補?
A:互補。PatMax 屬規則型(Rule-based)幾何定位工具、ViDi(VisionPro Deep Learning)屬 AI 深度學習工具〔來源:Cognex 官方文件〕。Cognex 官方推薦 Hybrid 部署:規則型場景用 PatMax、複雜場景(低對比、變形物件、紋理表面等)用 ViDi 補強。具體選擇依場景而定、請與 VSK 工程師討論。
Q8:哪些 Cognex 智慧相機內建 PatMax?
A:In-Sight 3800、In-Sight 7000、In-Sight 8000、In-Sight 8900、In-Sight 9000 系列等規則型工具均含 PatMax〔來源:各機型 In-Sight datasheet〕。其他機型請參考該機型 Cognex 官方 datasheet 確認。Cognex VisionPro Suite(PC 軟體)亦含 PatMax 工具庫。
Q9:自己學 PatMax 怎麼開始?
A:Cognex 官方提供下列學習資源:① Cognex In-Sight Explorer 軟體(cognex.com 免費下載、含 PatMax 操作)、② Cognex EasyBuilder 介面(GUI 操作學習)、③ Cognex 官方 Webinar 與線上技術資源(cognex.com/resources)〔來源:Cognex 官方〕。台灣由 VSK PSI 認證代理 Cognex、可提供 In-Sight 與 PatMax 操作訓練、請與 VSK 工程師討論。
想用 PatMax 解決產線問題?
VSK 工程師熟悉 PatMax 各場景應用,可協助您:
- 評估 PatMax 是否適合您的檢測需求
- 燈光、鏡頭設計(影響 PatMax 表現的關鍵)
- 樣本拍攝與訓練
- PLC / 機械手臂整合
請提供 OK / NG 樣品照片,VSK 評估後會盡快與您聯繫並提供可行性與選型建議。
PatMax 與 PatMax RedLine 關係
PatMax 為 Cognex 標準幾何定位演算法、適用於大多數工業視覺場景。PatMax RedLine 是 PatMax 的高速優化變體(速度規格依機型與場景而異、可與 VSK 工程師討論)。詳細介紹見 PatMax RedLine 完整介紹。
PatMax 與相關公開技術概念
PatMax 屬於圖樣比對(Pattern Matching)技術範疇、相關公開技術概念:
- Template Matching(樣板比對) — 影像處理基本技術、用樣板影像在目標影像中搜尋相似區域〔來源:Wikipedia "Template matching"〕
- Geometric Pattern Matching(幾何圖樣比對) — 從邊緣輪廓提取幾何特徵、相較灰階比對更抗光線變化〔來源:工業視覺技術文獻〕
- Sub-pixel Edge Detection(次像素邊緣偵測) — 透過內插法達到比像素更高的邊緣定位精度〔來源:Wikipedia "Subpixel rendering" 相關、學術文獻〕
PatMax 為 Cognex 商業化的幾何圖樣比對演算法之一、具體演算法細節與精度規格、請參考 Cognex VisionPro 與 In-Sight 官方文件。
PatMax Cognex 官方文件來源
- Cognex In-Sight Help System — PatMax Patterns 操作說明(support.cognex.com)〔來源:Cognex 官方文件 support.cognex.com/docs/is_640/web/EN/insight/Content/PatMaxPatterns.htm〕
- Cognex VisionPro Software — PatMax 產品頁(cognex.com/products/machine-vision/vision-software/visionpro-software/patmax)〔來源:Cognex 官方〕
- Cognex Blog — PatMax RedLine 相關技術文章〔來源:Cognex 官方 blog〕
PatMax 具體技術規格(速度、精度、訓練樣本、適用解析度範圍等)、依機型與場景而異、請參考各 Cognex 機型 datasheet 與官方技術文件。
PatMax 應用類別總覽
PatMax 在工業視覺常見應用類別(公開應用案例分類):
- 機械手臂 Pick-and-Place 引導 — PatMax 找零件位置與角度、輸出 PLC / Robot Controller
- 2D 條碼 / DataMatrix 定位 — 配合 DataMan 系列、PatMax 先找碼位置再讀碼
- OCR 字元區域定位 — 配合 OCRMax 或 Edge Learning Read、PatMax 先定位字元區域
- 量測站對位 — PatMax 定位被測物、配合 Caliper / Edge Tools 量寸法
- 多 SKU 自動辨識 — Multi-Model PatMax 同時辨識多種產品型號
- 瑕疵檢測前定位 — PatMax 定位後、Blob / Surface Inspection 工具做瑕疵判定
各應用具體規格、整合方案、精度需求、請與 VSK 工程師討論您的應用情境。Cognex 官方應用案例與整合指引、請參考 cognex.com 案例頁。
內建 PatMax 的 Cognex 產品(datasheet 驗證)
- Cognex In-Sight 3800 系列(IS3801-IS3816、6 解析度等級)— algorithms 含 PatMax、PowerGrid、Hotbars、OCRMax〔來源:In-Sight-3800 datasheet〕
- Cognex In-Sight 7000 / 8000 / 8900 / 9000 系列 — 規則型視覺工具含 PatMax〔來源:各機型 In-Sight datasheet〕
- Cognex VisionPro Suite(PC 軟體平台)— 含 PatMax 工具庫〔來源:Cognex VisionPro 官方〕
其他 In-Sight 機型是否內建 PatMax、請參考該機型 Cognex 官方 datasheet 確認。
延伸學習:了解 PatMax 圖樣定位在工廠自動化視覺整合的應用,含 Cognex 機型選型與案例對應。