ToF 是什麼?
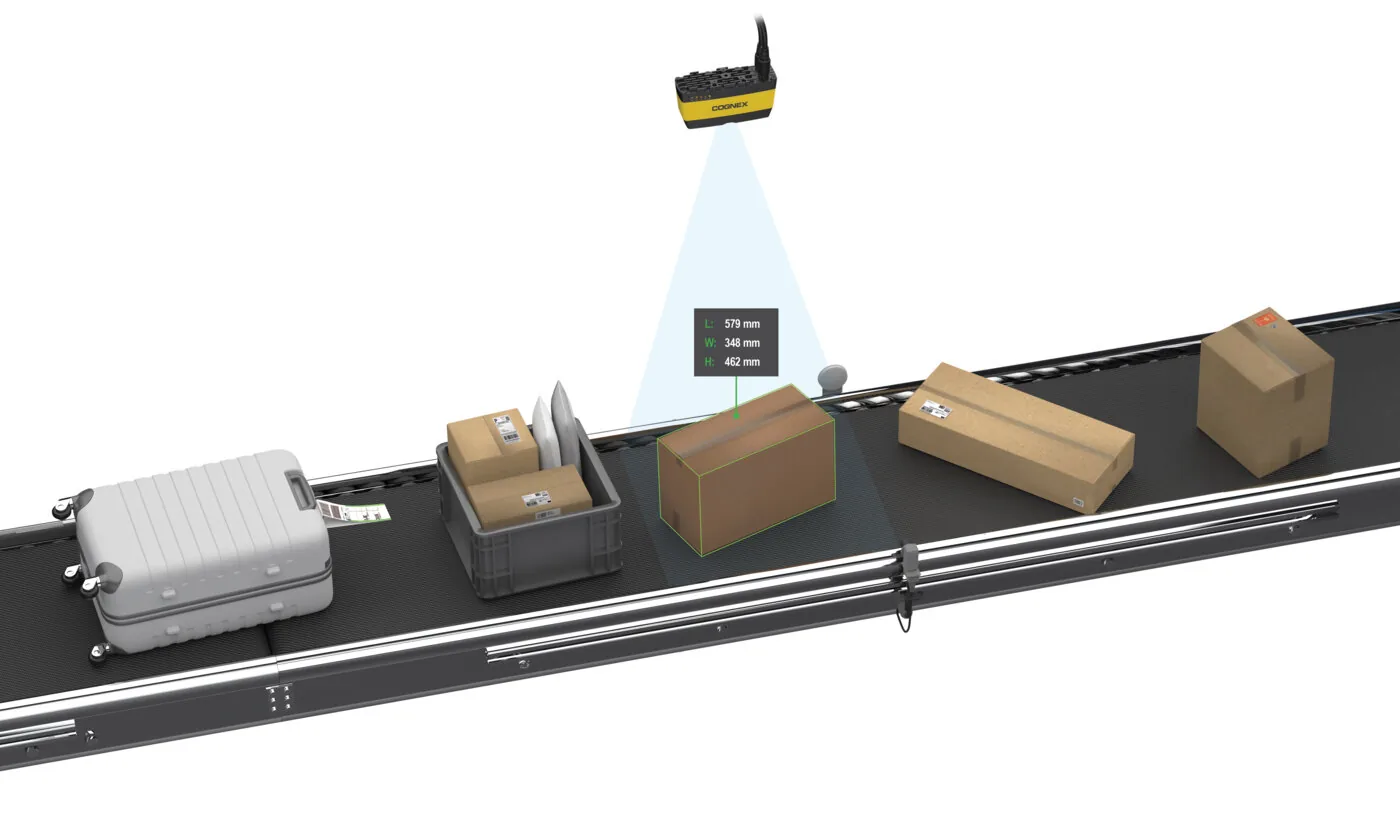
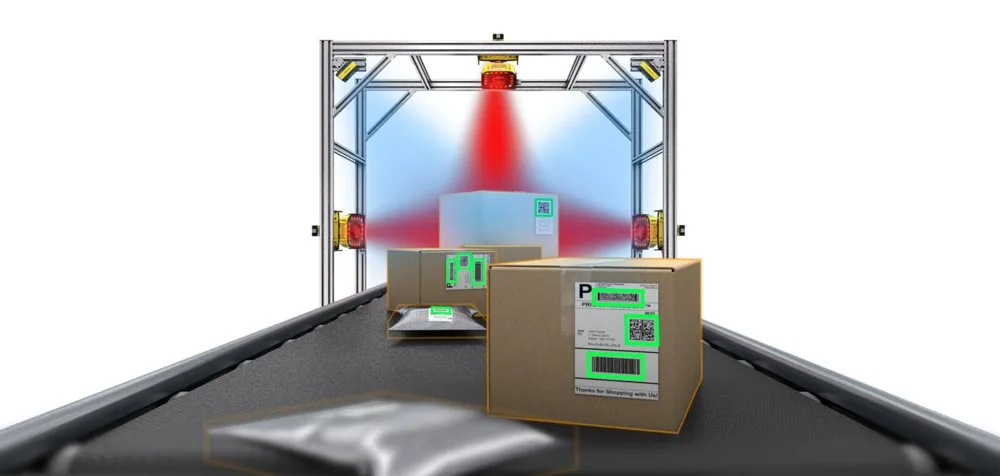
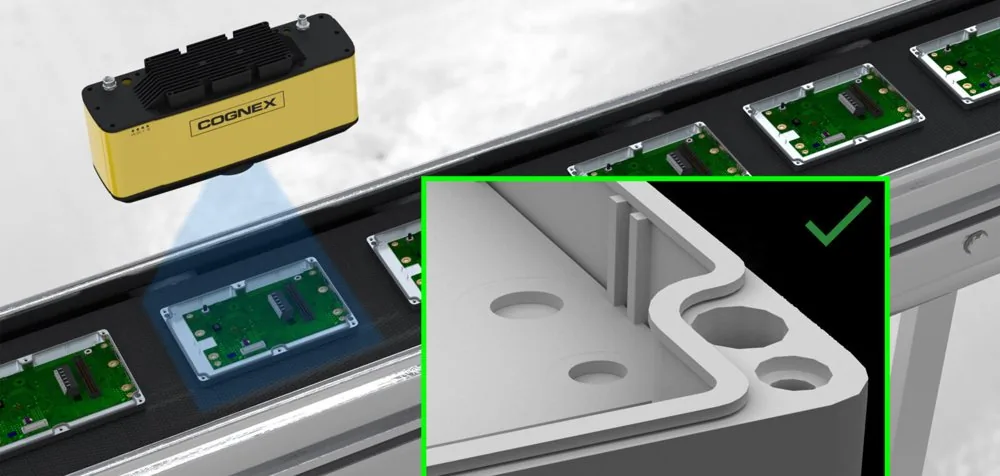
圖片來源:Cognex Corporation
ToF(Time of Flight,飛時測距)= 量測光打到物件回來的時間 → 反推 3D 深度。
原理:
- ToF sensor 發射紅外光脈衝(如 850 nm IR)
- 光打到物件 → 反射回 sensor
- 量測往返時間(picoseconds 級)
- 距離 = 光速 × 時間 / 2
特性:全 sensor 同時測所有像素深度,速度極快(30-60 FPS 3D 影像)。
ToF vs 其他 3D 技術完整對比
| 技術 | 精度 | 速度 | 視野 | 成本 | 強項 |
|---|---|---|---|---|---|
| ToF | ±5-20 mm | 30-60 FPS | 中-大 | 低 | 快、便宜 |
| 結構光 3D | ±0.01 mm | 5-15 FPS | 小 | 高 | 精度最高 |
| Stereo Vision | ±0.5-2 mm | 10-30 FPS | 大 | 中 | 視野大 |
| 雷射線掃 | ±0.1 mm | 連續 | 線 | 高 | 連續產線 |
ToF 4 大應用
1. 物流體積量測
- 棧板、箱子、包裹體積快速量測
- 30-60 FPS 連續測物流線
- ToF 業界範例如 ifm / Sick / Helios 等;Cognex 3D-A1000 採用的是 Symbolic Light 結構光技術,並非 ToF
2. 人臉識別 / 人員計數
- 智慧零售、保全
- 區分平面照片 vs 3D 人臉
3. AGV / AMR 避障
- 移動機器人感測前方障礙物
- 360° 環境深度地圖
4. 大物件 3D 掃描
- 倉儲庫存 3D 體積
- 大空間結構量測
ToF 5 大特性
優勢
- 速度快(30-60 FPS 完整 3D 影像)
- 全 sensor 同時測(不像 Stereo / 結構光需匹配演算法)
- 不依賴物件紋理(主動發光不需自然圖案)
- 大視野(cm 級到 m 級)
- 成本中低(單 sensor + IR LED)
弱點
- 精度有限(mm 級,不如結構光 μm 級)
- 多反射干擾(金屬鏡面)
- 強光環境失效(戶外陽光)
- 黑色物件吸光(深度不準)
ToF 在工業視覺角色
ToF 工業視覺不主流(精度不夠工業量測)。但在以下場景有用:
| 場景 | ToF 適用度 |
|---|---|
| 精密尺寸量測(μm) | 不適合(精度不夠) |
| 物流體積量測(cm 級) | 適合 |
| Bin Picking 大件(粗略定位) | 適合 |
| 機械手臂避障 | 適合 |
| 連續品質檢測 | 不適合 |
Cognex 主推結構光 3D(微米級精度),不主推 ToF。3D-A1000 物流體積量測機型採用 Cognex 專利 Symbolic Light 結構光(非 ToF),3D-A5000 精密量測機型採用 LightBurst 結構光。
工程師常見問題
Q1:ToF 跟 LiDAR 一樣嗎?
A:相似但不同:
- ToF Camera = 整個 2D sensor 同時測,輸出深度影像(depth map)
- LiDAR = 雷射掃描,輸出 3D 點雲
LiDAR 精度更高但設備更貴更大。
Q2:ToF 跟 Stereo Vision 怎麼選?
A:
- 動態場景 / 速度優先 → ToF(不需匹配 disparity)
- 靜態 / 精度優先 → Stereo(精度較好)
- 大視野 → Stereo(ToF 視野受限於 IR 光功率)
Q3:iPhone Face ID 是 ToF 嗎?
A:Face ID 本身是結構光技術(Dot Projector 投射 IR 點陣 + IR camera 解算深度),不是 ToF。Apple 的 ToF 技術是 iPhone Pro / iPad Pro 上的 LiDAR Scanner(dToF 直接飛行時間),主要用於 AR 場景建模而非臉部辨識。
Q4:能跟 Cognex 整合嗎?
A:間接。ToF camera(如 Basler ToF、Intel RealSense)輸出 depth map → Cognex VisionPro 軟體做後處理。Cognex 自家 3D 主推結構光 3D。
Q5:ToF 跟結構光 3D 的差別?
A:ToF 用光脈衝飛行時間量測深度、單次拍攝得到 3D 影像、適合大範圍快速量測;結構光投射圖案、由變形計算 3D、精度更高但視野通常較小。物流體積量測常用 ToF、半導體精密量測常用結構光。
Q6:ToF 在物流應用的優勢?
A:ToF 可即時量測包裹長寬高、計算體積、識別堆疊與遮蔽。一次拍攝即得 3D 資料、處理速度快,適合自動倉儲、機場行李分揀、包裹計費等場景。Cognex 3D-A1000 為對應主力機型。
想評估 ToF / 3D 應用?
VSK 提供完整 3D 視覺評估:
- 3D 技術選型 — ToF / 結構光 / Stereo / 雷射對比
- Cognex 3D 機型對應 — 3D-A1000 / A5000 / L38 / S1000
- 整合方案 — 含機械手臂、PLC、MES 介接
請告訴 VSK 您的 3D 應用需求,VSK 評估後會盡快與您聯繫。
Time of Flight 飛行時間量測原理
Time of Flight (ToF) 為主動光測距技術、量測光從發射到反射回來的時間差:
- 距離 = (c × t) / 2(c = 光速、t = 往返時間)
- direct ToF (dToF) — 直接量測光脈衝往返時間(皮秒級電子)
- indirect ToF (iToF) — 量測連續調變光的相位差(mm 級精度)
- 典型範圍:mm 級到數十公尺
來源:Wikipedia "Time-of-flight camera"、光學公開技術文獻。
ToF vs 立體視覺 vs 結構光 vs 雷射輪廓
- ToF — 全幅 3D depth map、無視差盲區、適合動態場景、精度 cm 級
- 立體視覺(Stereo Vision) — 雙相機視差三角測距、需紋理特徵、精度 mm 級
- 結構光 — 投影條紋反算 3D、靜止物精度 sub-mm
- 雷射輪廓(Cognex 3D-A1000) — 線雷射掃描、生產線微米級精度(依機型而異)〔來源:Cognex 3D-A1000 datasheet〕
相關產業應用:了解 Time-of-Flight 在物流業包裹體積量測的應用,包含 Cognex 機型選型與案例對應。